超音波風速計を自作しようと思い、超音波センサ(圧電素子)の受信回路を考えています。
具体的には、超音波が約20cm離れたA地点からB地点まで到達する時間と、B地点からA地点に到達する時間の両方を測定し、そこからAB方向の風速を計算するというものです(A→Bだけでもいいのですが、B→Aも計れば音速による誤差がキャンセルできます)
これを2軸以上用意し、風向はベクトルで計算します。
超音波の送受信には秋月のPT40-18/PR40-18を使用します。
http://akizukidenshi.com/catalog/g/gI-00170/
送信器は30Vp-pの矩形波(40kHz)で駆動し、
受信回路は、オペアンプなどで増幅しマイコン(H8/3052F)に入力し、マイコン内臓の25MHzタイマーで計測するつもりです。
そこで、受信回路なのですが、市販品に倣って0.01m/sの分解能を出そうとすると、超音波の到達をおよそ30nsの精度で検出しなければならず、オペアンプの遅延がかなり大きな問題となりそうです。
また、単なるオペアンプではなく、計装アンプを用いたほうがノイズが少ないと思うのですが、
いろいろ探しても計装アンプはスルーレート30V/us程度がせいぜいで、マイコンに入力できるレベルに立ち上がるまでの時間が遅すぎて使えないと思われます。
また、オシロで確認しますと、センサに発生する波形はおよそ6mVp-pの正弦波になっており、
少しでもセンサの信号に変化があればすぐに信号が立ち上がるよう、オペアンプのゲインは1万倍程度は必要で、データシート曰く、高ゲインにするとますますスルーレートが下がってしまうようで、困っています。
高精度に受信開始の時間を計測したい場合、どのような回路を利用すればよいでしょうか、どなたかお力をお貸しください。
A 回答 (10件)
- 最新から表示
- 回答順に表示
No.10
- 回答日時:
No.5、No.7で、1周期当たり4点サンプルの、振幅と位相の算出法を示しました。
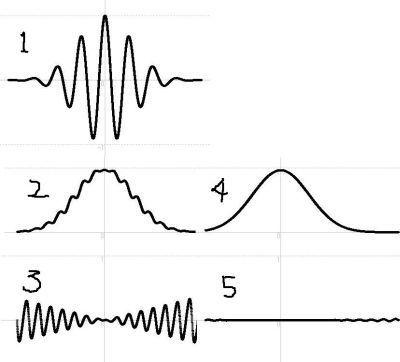
信号がサンプル周波数の整数分の1で、線スペクトラムなら、重み付けのない平均化つまり矩形窓が良好ですが、スペクトラムが拡がっている場合の施策として窓関数があります。No.8の紡錘形包絡線正弦波exp(-(ωt/10)^2)cos(ωt) に対し、2サイクルのBlackman窓を試してみました(文末プログラム)。大きな効果が認められましたのでご紹介します。正弦波の1、2サイクル幅のスパンで添付図1の入力信号(最大振幅1)をスキャンする時、相対位置(時刻)関係によって振幅位相の算出値がどの程度変化するか見てみました。図はすべて同じ縮尺、振幅1と位相1rad が同寸法です。1サイクルで得られるデータから以前紹介の方法(矩形窓)で振幅位相を計算すると、振幅は図2のように、位相誤差は図3のように波打ってしまいます。中央部分でなければ使用に耐えません。ちなみに矩形窓の2サイクルも改善はありません。ところが、Blackman窓によれば、振幅図4、位相誤差図5のように改善されます。入力信号の振幅が半分程度の包絡線過渡期にあっても位相の誤差は、5mradにすぎません。無風キャリブレーションを加味すれば、微風域の誤差はさらに小さいのです。
数点のサンプルだから情報の欠落がある、単純正弦波でないから駄目とは限りません。デジタル信号処理のこのような巧妙さは、数値シミュレーションでなければ見逃してしまう可能性があります。製作当初はサンプリングデータをPCに取り込み、処理方式を模索したほうが良いように思います。サンプル点が少ないと直感的に不安かもしれませんが、一方で最終的に必要なのは遅延時間という一つの数値ですから、サンプル点が数個も必要なのが不思議という見方もできます。騒音などが含まれれば困難は増しますが、サンプルレートを上げて楽になるのはアンチエリアシングLPFの負担であり、騒音等ノイズの抑圧は、特徴が無い限り、観測時間を長くする方向でしか解決できません。
160kspsで、クロック数として一定間隔サンプリングが可能なら、H8/3052Fは使用可能でしょう。なるべく簡単な回路で、まず感触を掴んでみるのはいかがでしょう。デューティは正しく1対1でなくて良いので、H8/3052Fからサンプル周波数の1/4の「連続矩形波」を供給し→小バッファ→送信素子→超近距離→受信素子→AMP兼1次LPF→A/Dでも良いのではありませんか。最初からあれもこれもは疲れます。サンプリング相対位置を1度刻みくらいで変化できるファームウェアは、どうせトラブルシュートに不可欠でしょうし、それがあれば、無風距離固定でも、得られる知見は多いと思いますよ。例えばアンチエリアシングLPFの不足量も測定できます。3次高調波が基本波比率 a だけ含まれていれば、前記位相シフターにより、π/2 rad 周期、±a radの正弦波状うねりが観察されるでしょう。3逓倍の折り返し反転位相スペクトラムが基本波に加算されるからです。また、キャリブレーション後、波打ちの原点は、無風点に一致するように誤差補正される筈です。このような好都合は他所にもあり、何度か述べました。風速が大きければ0.01 m/s の位相精度は不要な事に留意した各所最適化が望まれます。
! 4点/サイクル、1サイクル矩形窓、2サイクルblackman窓で振幅位相はどう観測されるか
OPTION ARITHMETIC COMPLEX
LET j=COMPLEX(0,1)
LET freq=40e3 !信号周波数
LET w=2*PI*freq
LET dt=1/freq/4 !サンプル時間間隔
DEF f(t)=EXP(-(w*t/10)^2)*COS(w*t)
SET WINDOW -4/freq,4/freq,-1.1,1.1
FOR t=-4/freq TO 4/freq STEP dt/100
PLOT POINTS: t,f(t) ! 信号波形
NEXT t
! 観測窓の移動に対し、振幅推定値はどうなるか、位相推定値の誤りはどうなるか
FOR t=-4/freq TO 4/freq STEP dt/100
LET y1=f(t)+j*f(t+dt)-f(t+2*dt)-j*f(t+3*dt)
PLOT POINTS: t+1.5*dt,ABS(y1)/2 !矩形窓振幅
PLOT POINTS: t+1.5*dt,ARG(y1*EXP(j*w*t)) !矩形窓位相誤差
LET y2a=0.015*f(t)+j*0.172*f(t+dt)-0.555*f(t+2*dt)-j*0.939*f(t+3*dt)
LET y2=y2a+0.939*f(t+4*dt)+j*0.555*f(t+5*dt)-0.172*f(t+6*dt)-j*0.015*f(t+7*dt)
PLOT POINTS: t+3.5*dt,ABS(y2)/1.68 !Blackman振幅
PLOT POINTS: t+3.5*dt,ARG(y2*EXP(j*w*t)) !Blackman位相誤差
NEXT t
END
フリーの「十進BASIC」を使わせていただきました:http://hp.vector.co.jp/authors/VA008683/
-
-

- 0
- 件
-
まだ理想的な波形のことを考えるので精一杯で、波形の歪みに対する対策まで頭が回っていませんでしたが、恐らくこのまま突き進んでいては私はまた途方に暮れていたと思います。
こちらでも、コンピュータでいろいろグラフを描き、ようやく理解が進んできました。
仰るとおり、まずは連続矩形波で感覚をつかんでみるつもりです。
ここで質問しなければ、窓関数という着想に辿り着くことは決してなかったと思います。
わざわざグラフ描画のプログラムまで付けて頂き、感激の一言です。本当にありがとうございました。
No.9
- 回答日時:
veryyoungさんのアイデア、相互相関関数による全体的な捉え方(一瞬のタイミングではない捉え方)は正攻法だと思います。
しかし、40kHz 25usecという周期と30nsecという所要分解能の開きがあまりにも大きいので、不注意に作ったら機能しないものになってしまうでしょう。いちど波形を大きな方眼紙に作図してみることを強くお勧めします。A3くらの大きな方眼紙にいっぱいになるサイン波をひとつ描き、その周期の1/833だけずれたサイン波も描きます。そして、その1周期内に4点のAD変換ポイントも描きます。(たとえば、最初のサイン波の位相で45, 135, 225, 315度)
この作業をすると、サイン波を描くためのX,Y値が粗いと如何に波形が決まらないかが身をもって解ります。そして、ほんのちょっとの波形歪みが致命的な誤差になることも解ります。サンプリング理論は波形の帯域を厳密に規定しているので、歪みなんて無い前提ですが、実際には受信波形は相当歪むでしょう。ADの入り口に60kHzくらいの4次くらいのLPFを入れることをお勧めします。
計算上はADは±0.7%以下くらいの精度が得られれば30nsecの分解はできそうです。
ADのクロックのジッタも問題です。サンプリングを速くするのではなく、安定にすることが精度向上に必須です。もとが水晶等の安定で低ジッタの周波数ではなく、送信素子の共振周波数でしょうから、波形をクリーニングするのも大変です。実際にはPLLを使った波形クリーナも売られていますが、この周波数のは見たことがないですね。
時間をかけてサンプリングに必要な諸特性を求めれば、こんな定性的な回答でなく、「こうすれば良い」と言い切れるのですが、時間がかけられないので、ご自分でトライ(経験)なさってください。
-
-
- 0
- 件
-
アドバイス頂いた波形の作図を実践しました。
具体的なADの値が1/833の位相のずれでどれくらい変化するかも視覚的にわかりましたが、
非常に小さい差ですが、波形がきれいな正弦波で、ADのアクイジション時間が十分短ければ、検出は不可能ではない、といった感触でした。
そもそも現状の回路では送信波が矩形波ですし、受信波が歪んでいるのは間違いありませんから、今まで自分で考えていたような単純な処理では厳しいというのも頷けました。
実際のADの値を見ながら、LPFを付け加えることを考えようと思います。
今はすぐに回路を組める状態にないのですが、今まで頂いたアドバイスを最大限に活用して良い物を作りたいと思います。本当にありがとうございました。
No.8
- 回答日時:
No.7へのコメント拝見しました。
送信波形の生成と同時に、160kspsのサンプリングが、ジッタ無く行えるかどうかが、位相精度に絡むマイコン選択の鍵です。すでに述べましたが、探索信号がバースト波であってもスペクトラムは、40kHz中心数kHzの帯域内に制限されていますし、遅延時間でそれが変化する事はありませんから、ナイキスト周波数的には、160kspsで事足りる可能性が大きいのです。懸念されているような急減な変化はノイズにほかなりません。例えば80kHzのLPFをA/Dの前に置いても、波頭の検出が阻害されるものではありません。意外かもしれませんが、あなたの原案のエッジ検出においても同様です。遅延時間の情報は受信波形の1点に局在しているわけではありません。
160kspsは粗く感じられるかもしれませんが、高いサンプルレートによらずとも、情報の取り逃がしは僅少かと思います。2点で直線が決まるように、また3点で二次曲線が決まるように、正弦波の当てはめを想像すれば、再現波形が離散時間値でない事が納得できると思います。包絡線もしかり。先見情報がありますから、時間分解能は、サンプルレートを超えられるのです。
相互相関の件、仮に送信波形が exp(-(ωt/10)^2)cos(ωt) のような紡錘形包絡線の正弦波であったとしましょう。この関数をサンプル点毎に逐次乗じ、積分したものが最大となるような関数側のシフト時間を探索すれば良いわけです。関数のシフト量には分解能制限は無いことに着目ください。しかし何か工夫をしなければ計算量が膨大です。前処理として包絡線と位相に分離し、それぞれ長遅延用と短遅延用に特化すれば、そういう探索は不要という訳です。
私は、160ksps 10bitで質問者様の仕様に合うように思いますが、勘違いがあるかもしれません。不審な点はご指摘ください。
-
-
- 0
- 件
-
No.7
- 回答日時:
A/Dの方法をお試しになるとの事、No.5の説明不足を補っておきましょう。
バーストであれ連続であれ、S/N的には、探査信号と類似波形の相互相関を求めるような手法が最善な筈です。探査信号周波数スペクトラムは、送信圧電素子の共振特性により、40kHz中心数kHzの帯域内に制限されています。その意味で波頭エッジ検出やゼロクロスより、正弦波としての位相や包絡線のエッジ検出が、騒音や内部ノイズの抑圧において適切な可能性は大きく、その準備がA/D変換です。H8/3052Fは160kspsギリギリ可能なのか不足なのか読み取れませんでしたが。
位相の差し引きは arctan(y/x) を取った後の減算ではなく、それ以前に複素数の乗算として4象限で行うとよいでしょう。プラスマイナス180度がジャンプなく取り出せます。包絡線についても触れておきましょう。各点振幅√(x^2+y^2)にカーブフィッティングしたものが時間連続値としての包絡線と捉えられます。オーバーサンプリングに類似です。なお、位相、包絡線の使い分けをしなくても、探査信号と類似波形の相互相関を最大とする時刻遅延値を計算する事で目標は達成されるかもしれませんね。
この回答への補足
回答ありがとうございます。
160kHzでサンプリングすると1回あたりにかけられる時間は6.25usとなり、H8/3052のAD変換は変換時間が5.36usですので、割り込みのオーバーヘッドやメモリに書き込む時間などを考えるとかなりギリギリですが不可能ではないと思います。
しかし、H8/3052Fはサンプリング時間が1.24usもあり、高精度の振幅値が得られるかは不安があります。
とりあえず駄目もとで試し、駄目なら別のもっと高速なAD変換器を探そうと思っております。
位相の差し引きについても参考にさせていただきます。
ひとつだけお聞きしたいのですが、
「探査信号と類似波形の相互相関を最大とする時刻遅延値」の意味を、もう少し詳しく教えていただけませんでしょうか。
おかげさまで当初よりかなりいいものができそうです!
よろしくお願いします。
-
-
- 0
- 件
-
No.6
- 回答日時:
またまたNo.2 tanceです。
ADコンバータで位相を計測する方針とのことですが、ひとことヒントを。
ADコンバータは振幅も時間も量子化します。時間分解能30nsecを満足させられるADコンバータの仕様は結構大変ですが、大丈夫ですか?ADコンバータのサンプリングレートを30nsにする必要はありませんが、サンプリング点と次のサンプリング点の間を何らかの補間により30nsec分解能を実現すれば良い訳です。サンプリング間隔と振幅方向の分解能の関係は非常に重要です。
補間も直線補間だけではなくいろいろな補間がソフト的に可能です。ご検討ください。
この回答への補足
何度もありがとうございます!
とりあえずはH8/3052内臓のADコンバータを利用しようと考えましたが、
分解能については結構不安があります。
veryyoungさんが仰るように、160kHzのレートで(90度ごとに)AD変換し、
波が正弦波であれば、連続して得られる値が位相差のsinとcosの関係になっていることを利用して位相差が求められると思います。
160kHzでサンプリングすると1回あたりにかけられる時間は6.25usとなり、
H8/3052のAD変換は変換時間が5.36usですので、かなりギリギリですが不可能ではないと思います。
しかし、サンプリング時間が1.24usと長いので、サンプリング中の信号変化でかなり誤差が出そうなことは予想できますが、とりあえず駄目もとで試して、駄目なら別のAD変換器を使ってみようと思っていました。
H8/3052だけでは明らかに無理という感じであれば、最初から高速なAD変換ICを探してみようと思いますが、やはりH8では難しいでしょうか?
-
-
- 0
- 件
-
No.5
- 回答日時:
No.3にいただいたコメントおよびNo.4のご意見を参考に、ご提案です。
正弦波による振幅の変復調は面倒で避けたいし、マルチパスの影響も低減したいですね。
キャリア周波数の4倍のサンプル周波数でA/D変換後、すべてデジタル処理というのが定石かもしれません。 1サイクル中のサンプルデータを d0,d1,d2,d3 とするなら、x=d0-d2, y=d1-d3 と計算される (x, jy) が、複素平面上で位相を示します。複数サイクル平均において必要な演算は加算だけです。A/D変換器は10bitで良いでしょう。
振幅値を使う事により低速度でゼロクロス点が算出できるようになったと捉えれば、ゼロクロス検出法との関係が分かりやすいかもしれません。ただし、同じ観測時間(同じキャリアサイクル数)におけるノイズやドリフトは十倍以上改善されていると思います。
デジタルフィルタにはアナログフィルタのような余韻がありませんから、いろんな事が回路定数変更なしに試せます。送信をバースト正弦波とし受信信号処理に観測窓を設ければ遠方マルチパスの影響は改善されるでしょう。風速の大きい場合は、包絡線位置に着目する事により位相回転に悩む事もありません。
マルチパスの件、無風キャリブレーション後は、風速比例誤差(零点誤差でなく)として生じそうですね。誤差を1% にするには混入量も大雑把に1% に抑えなくてはならないという事でしょう。懸念されるのは基台と共に直交方向の支柱の反射量です。確かに表面の工夫が必要かもしれませんね。時間窓で取り除こうとすると、40kHzの2サイクルくらいしか使えない事になってしまいます。圧電素子の帯域からして、包絡線は2サイクルで整定しないでしょう。もっとも再現性があれば整定は不可欠とも言えません。
不必要になりつつありますが、他のご質問にも触れておきましょう。
位相検波器は、矩形波との乗算で十分なので、
http://www.seekic.com/uploadfile/ic-circuit/2012 …
http://akizukidenshi.com/download/kairo/%E3%83%8 …
のような感じです。あなたのイメージのアナログ乗算だと
http://www.analog.com/jp/special-linear-function …
の方が良いかもしれません。
位相は、二つの位相検波器(0度、90度)の出力から計算します。センサ等、前段のゲイン変化による振幅変化はキャンセルされ、誤差になりません。
変調方法は、変調度50%くらいの正弦波AM変調を思い浮かべていました。
http://nippon.zaidan.info/seikabutsu/2005/00138/ …
キャリアの位相情報と共に変調波の位相情報も同時使用できそうです。
-
-
- 0
- 件
-
あまりじっくりと考える時間がなく、お礼が遅くなり申し訳ございません。
オペアンプで300倍程度に増幅後ADコンバータを利用して位相差を計算し、無風キャリブレーション時の理論値を利用して補正する方針で考えていこうと思います。
マルチパスの件、今の構造のままではかなり反射波が出てしまいそうです。
実際にADで出た数列を見て、いろいろ試しながら考えていこうと思います。
具体的な計算式まで出していただき本当に助かりました!
ありがとうございました。
No.4
- 回答日時:
No.2 tanceです。
位相検波(同期検波)は良い方法だと思いますが、信号中に含まれるマルチパスの影響が心配です。つまり、送信された音波が直接受信されるのは、音波が初めて到達するときだけで、以後は周辺の固定物(送信機や基板や構造物)からの反射が様様な位相で加わってきて、合成波はかなり乱れた波形になることがあります。当然固定の位相シフトが生じます。反射波は減衰しているのですが、経験上、無視できない誤差が生じ、意外と苦労します。
オープンエアなので、センサや周辺のハードの表面状態を工夫するなどすれば克服できそうな気がします。(フェルト状の表面?) チューブの中や配管内の風速測定だと、マルチパスは非常に大きな問題になっています。
質問者様はかなりのモチベーションで取り組んでおられることが伝わってきます。是非、実際の波形を良く見て色々なアイデアを試してみることをお勧めします。
-
-
- 0
- 件
-
あまりじっくりと考える時間がなく、お礼が遅くなり申し訳ございません。
オペアンプで300倍程度に増幅し、ADコンバータを利用して絶対時間を位相差から計算し、無風キャリブレーション時の理論値を利用して補正する方針で考えていこうと思います。
マルチパスの件、おそらく今の構造では過酷な戦いになりそうです(笑)
実際に試しながら対策を考えていこうと思います。
2回にわたる回答誠に有難うございました。
No.3
- 回答日時:
40kHz 信号の 30ns というとおおよそ 千分の1 周期ですね。
エッジ検出と言う視点のアプローチは難航しそうに思います。連続正弦波の平均位相を取り出したほうが良いでしょう。それは位相検波器により達成できます。原理は簡単です。http://www.nfcorp.co.jp/techinfo/dictionary/020. …
http://qube.phys.kindai.ac.jp/users/kondo/lectur …
風速は無風時位相からの変化で得られます。No.2さんのおっしゃるノイズ改善も自然に高能率に達成できます。
ご提案の逆経路測定を盛り込めば、音速の影響の抑圧のみならず、温度による電子回路の遅延変化のキャンセルも達成されます。オペアンプの遅延時間が障壁となる事はないでしょう。
40kHz 距離 20cmにおける0.01m/sに対する角度 0.25度は十分検出可能でしょうが、しかし風速14m/s 程度で 360度回ってしまいますから、むしろそちらに工夫が必要です。周波数や距離はそのままでも 1kHz程度の変調を併用すれば、受け入れられる風速は100m/sを超えらそうです。振幅変調ならば包絡線の位相、位相変調ならば、位相変調波の位相を検出し、これを使用するのです。
回路構成は、増幅後、160KHzサンプリングのA/Dを用い、以後すべてデジタル処理という方法もありますし、変調波を取り出すところまではアナログで全て行う事もできます。
風速計は経験ありません。単なる思い付きを書いています。不審な点はご指摘ください。
この回答への補足
ご回答ありがとうございます。
電子工作の経験が浅く、
位相比較は難しそうなのでためらっておりましたが、おかげさまで見通しが立ってきました。
AB方向への超音波伝達時間をt、BA方向への超音波伝達時間をuとすると、
風速は 1/t-1/u に比例することになります。
したがって、気温による影響をキャンセルするためには、無風のときとの時間差(位相差)
だけではなく、どうしても絶対的な時間が必要になってきてしまいます。
そのため、エッジ検出を併用し、それまでに波がゼロクロスした回数と位相差の両方を使って時間を計算するなど考えていましたが、送信波に1kHz程度の変調を施せば、波長は20cmを超えますからほぼ問題なさそうですね(どのみち今の工作力で作るのには困難が伴いそうですが…笑)
変調については全くの無知で申し訳ないのですが、
復調回路を挟むことによる遅延や、ノイズによる誤作動などを考えると、
変調方法は振幅変調、位相変調どちらのほうが精度が出易いのでしょうか
また、ご教示いただいたサイトより、出力=信号振幅×cos(信号位相) となるようですが、
実際にセンサーにドライヤーなどで風を当ててみると、センサーの表面に力が加わることで位相だけではなく振幅が変化してしまい、位相を正確に計算するのが難しそうです。
また、一応それらしいICもあるようですが、利用できますでしょうか
http://www.analog.com/jp/rfif-components/detecto …
聞きっぱなしで申し訳ありませんが、よろしくお願いいたします。
-
-
- 0
- 件
-
No.2
- 回答日時:
カウンタが25MHzクロックで動くということは、時間分解能が40nsということです。
これ以下の精度を狙っても意味がありません。回路の遅れ時間そのものは補正ができれば問題にはならず、その変動が問題です。最低限、静止空気で補正値を取得するというキャリブレーションが必要だと思います。そして、一番の敵はノイズでしょう。こればっかりは補正できません。
仮にアンプされた受信信号の振幅が1Vあるとしましょう。このときはゼロクロス点でのスルーレートは約251mV/usecです。この傾斜の入力信号を閾値で切って30nsecの精度を出そうとすると、ノイズやオフセット(ドリフト含む)の合計は7.5mVまで許せます。この仮定ではアンプのゲインは167倍ですから無謀な値ではなく、7.5mVという許容変動も十分実現可能です。
1万倍して人の話し声等までひろって誤動作だらけになるより、100倍くらいのローノイズ、ロードリフトアンプを使うのが賢明だと思います。スピードは1段ではちょっと辛いかもしれません。手に入るOPアンプをいろいろ較べてスピードと電圧変動要素のバランスをとる必要がありそうです。
平均化も有用です。風速が変化しないうちに多数回測って平均化でノイズを減らします。(平均回数の平方根で改善します。例:16回平均すると4倍良くなる)
大振幅の送信段が近くにあるので、時間差があるとはいえ、回路的に飛び込みや回り込み対策が必要になるでしょう。
20cmをもっと長くすることはできないのですか?20cmの間隔で、センサやその基板があると風の通りの邪魔になって正確な測定ができなくなりませんか? また、風が受信センサに当たるときの風切り音がノイズとなって精度を悪化させるでしょう。
超音波ガスメータの特許を調べるといろいろヒントが出てくると思います。
-
-
- 0
- 件
-
ご回答ありがとうございます。
200倍程度の増幅率でも30ns以内に検出可能なのですね。
数mVの変動の検出が難しいと勝手に思い込んでいました。
20cmという長さについてですが、持ち運ぶ用途でなるべく小型化したかったので、風の邪魔になるのは覚悟の上で20cmで製作してしまいました。
その代わり、センサの組を2軸ではなく平面上に3軸配置し、得られる3通りの風速データのうちで最も風の強いものを採用することで補おうと考えております。
No.1
- 回答日時:
>そこからAB方向の風速を計算するというものです
空気中の音速は気温の1℃の変化あたり約0.6m/s変化するので、温度補正をしないと精度が出ないでしょう。
両方向測ればキャンセルできます。
>オペアンプの遅延がかなり大きな問題となりそうです。
遅延は、オペアンプだけでなく超音波センサでも発生します。
むしろ、こちらの方が大きいでしょう。
出来れば、センサに送受信兼用のものを使用して、双方向で同じセンサを使用して計測する事をお勧めします。
そうすれば、センサの特性が異なる事による遅延時間の差の発生を抑える事が出来ます。
遅延量が分かっていればその分の補正をすればいいのです。
>計装アンプを用いたほうがノイズが少ないと思うのですが
計装アンプの最大の特徴はコモンモードの除去性能に有ります。
今回の用途ではコモンモードの影響は無いので計装アンプを用いるメリットは全くありません。
>オペアンプのゲインは1万倍程度は必要で、
1万倍=80dBですね。
オペアンプ1段でゲイン80dBはかなり無理が有ります。
2段以上をお薦めします。
オペアンプによっては出力を飽和させた場合に飽和から回復するのに時間がかかる場合があるので、オペアンプを選ぶか、飽和させないように回路を工夫する必要が有ります。
1段目のアンプのフィードバック回路にダイオードを逆並列にしたものを適当な段数重ねれば出力の振幅を制限できます。
http://d.hatena.ne.jp/haneimo/20110605/1307259988
最終段にオペアンプでなくコンパレータを使用すれば飽和の問題は発生しません。
この回答への補足
送受信兼用のセンサは入手が難しそうなので、今回は別々のものを用いることにしました。
飽和させるのはよくないということで、増幅率を下げて最後はコンパレータを用いる方針で考えようと思います。
ご回答有難うございました。
-
-
- 0
- 件
-
お探しのQ&Aが見つからない時は、教えて!gooで質問しましょう!
似たような質問が見つかりました
- その他(自然科学) 風車音の測定 3 2023/04/28 07:12
- 工学 オペアンプによる増幅回路でのノイズ対策について 5 2022/03/22 16:06
- 物理学 風車が回転する理由 5 2023/05/08 08:03
- 物理学 風力発電での音 1 2023/04/16 08:55
- ガラケー・PHS SMSメールの受信遅延原因はガラケー自体の欠陥では 8 2022/08/06 11:46
- 物理学 波動方程式のようなもの 1 2023/05/13 07:23
- その他(自然科学) この2つはどこが間違いでしょうか? 2. 植物の葉に含まれるクロロフィルは可視赤色域の波長帯を強く吸 2 2022/05/17 16:55
- 物理学 物理 7 2023/08/05 11:51
- 物理学 光の回折 図は超音波による光の回折を示した概念です。この図では入力される超音波の周波数および入力され 5 2023/04/18 11:52
- 工学 オペアンプのスルーレートについてです。 1kHz,500mVの方形波に設定してスルーレートの測定を行 1 2022/11/09 17:03
デイリーランキングこのカテゴリの人気デイリーQ&Aランキング
-
オペアンプの位相差についてで...
-
2つの楽器等を同時に奏でる時、...
-
ステップ関数のフーリエ変換の...
-
RL回路における位相差の理論値...
-
単相交流を3相交流に変換する方...
-
電力量 i二乗×R のときは力率...
-
位相定数について
-
バイポーラオペアンプ使用時の...
-
LPF、HPFを使用したときの時間...
-
制御工学
-
オペアンプで電圧を約100倍...
-
ボード線図
-
物理の光の典型問題で、光路差...
-
ωCR??
-
オペアンプのボルテージフォロ...
-
オシロスコープの位相のずれ確...
-
以下の問題を教えてください。...
-
音声ラインの600Ωは何故60...
-
速そうな顔文字ください
-
e^(-2s)の逆ラプラス変換は何で...
マンスリーランキングこのカテゴリの人気マンスリーQ&Aランキング
-
オペアンプの位相差についてで...
-
RL回路における位相差の理論値...
-
単相交流を3相交流に変換する方...
-
2つの楽器等を同時に奏でる時、...
-
オシロスコープの位相のずれ確...
-
位相
-
自動制御(伝達関数)で出てく...
-
位相定数について
-
オペアンプのボルテージフォロ...
-
逆位相とは?
-
エンコーダの出力パルスは3種類...
-
発振回路の『正弦波』出力について
-
オールパスフィルタの振幅と位...
-
理想的なフィルタの位相特性
-
周波数特性から時定数を求める...
-
ωCR??
-
エクセルでボード線図を書くには?
-
電力量 i二乗×R のときは力率...
-
ステップ関数のフーリエ変換の...
-
PSKとQAM変調の符号誤り率
おすすめ情報
